An Introduction to Operator Fusion
A Simple Example
Consider a simple function that takes in an array of floats a,
and adds 1 to each element, storing its output in b:
void add_1(float * a, float *b, int N){
for (int i = 0; i < N; i++){
b[i] = a[i] + 1;
}
}
To perform 2 to elements to an array, we can simply call add_1 twice:
float * a = (float *) malloc(N * sizeof(float))
float * b = (float *) malloc(N * sizeof(float))
float * c = (float *) malloc(N * sizeof(float))
add_1(b, a, N);
add_1(c, b, N);
or, we can implement a special add_2 function:
void add_2(float * a, float *b, int N){
for (int i = 0; i < N; i++){
b[i] = a[i] + 2;
}
}
and simply call it:
float * a = (float *) malloc(N * sizeof(float))
float * c = (float *) malloc(N * sizeof(float))
add_2(c, a, N);
The add_2 function not only uses less memory, requiring no allocation for an
intermediate, it also takes advantage of locality. Each float is loaded once
and all operations are applied immediately, when the data is ready. This
technique of applying a sequence of operations back-to-back on susbets of data
rather than computing entire intermediate outputs is called operator fusion.
Traditionally, your favorite compiler runs a fusion pass, bringing computations into the same outer-loop scope when it can determine that the transformation is correct. While these passes typically fuse at single data element granularity, one can also generalize this idea to instead think about fusion happening at different granularities (4 elements, 8 elements, tiles of data, etc.).
Operator Fusion in Practice
High-performance applications are often built as compositions of function calls, many sourced from mature, highly optimized libraries like CBLAS. On Apple’s M3 chip, the fastest implementations of the CBLAS interface can be found in frameworks such as Accelerate and Arm Performance Libraries.
CBLAS itself contains several fused interfaces. For example, cblas_sgemm performs a matrix-matrix multiplication with optional transposition and scaling, all in a single call.
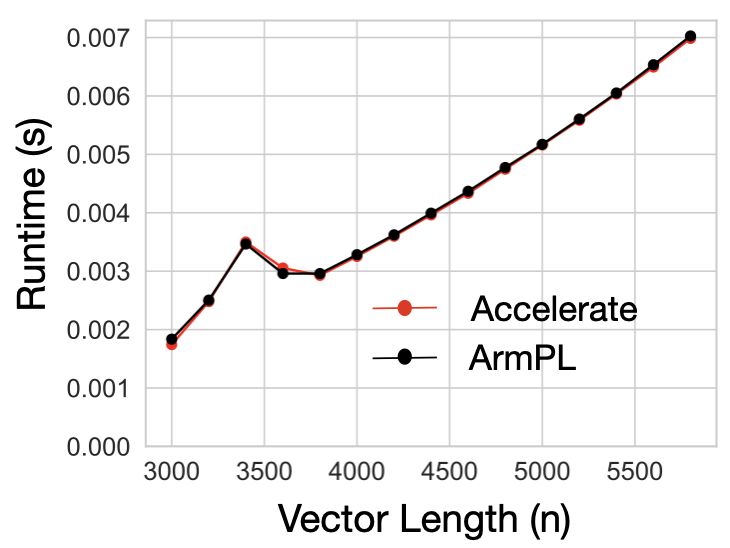
Say we want to compute a General Vector Rank Update (GER) operation expressed as \( A = \alpha (x \times y^T) + A \) where \( A \) is a matrix, \( x \) and \( y \) are vectors, \( \alpha \) is a scalar, and all datatypes are floats. Both Accelerate and ArmPL offer implementations of this operation, and their performance is pretty close.
If we were to comupute a slight variant of our computation, an SGERB \( A = \alpha (x
\times y^T) + \beta A \), we have two options. First,
we can use ArmPL’s fused BLAS extension interfaces that include an sgerb_ subroutine. Or, as
Accelerate has no fused subroutine, we can compose Accelerate’s cblas_sger and cblas_saxpy
subroutines.
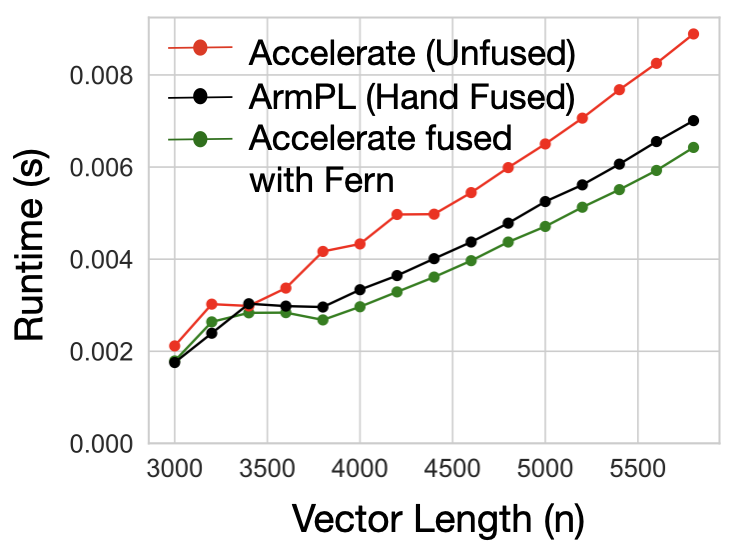
However, the fused ArmPL subroutine is 1.24× (geomean) faster than the composed Accelerate implementation. Since Accelerate already matched ArmPL’s performance on GER, the performance difference between the two implementations on GERB is not due to an under-optimized inner loop or poor instruction selection, but is rather introduced at the point of composition. ArmPL is able to fuse its computation, resulting in the difference that we see.
In our trivial example with add_1, we could quickly write a fused
implementation. However, in this case, we are stuck: each routine cblas_sger
and cblas_saxpy likely contains hundereds of lines of hairy,
architecture-specific code that would be time consuming to rewrite and error prone
to modify. Worse, both ArmPL and Accelerate are propriety frameworks. In fact, the
Accelerate library is the only way to target undocumented, Apple-specific
hardware. If our user wants to use this special hardware, they are tied to the
Accelerate library, which does not have extended BLAS kernels like
sgerb_. But, if our user wants to use fused implementations provided in
the BLAS extension interface, they must use ArmPL.
Instead of using naive subroutine calls for Accelerate, the user can use code generated by Fern, which continues to call Accelerate subroutines, but does so for small tiles of the output at a time. To see how to do this, head to the tutorial.